
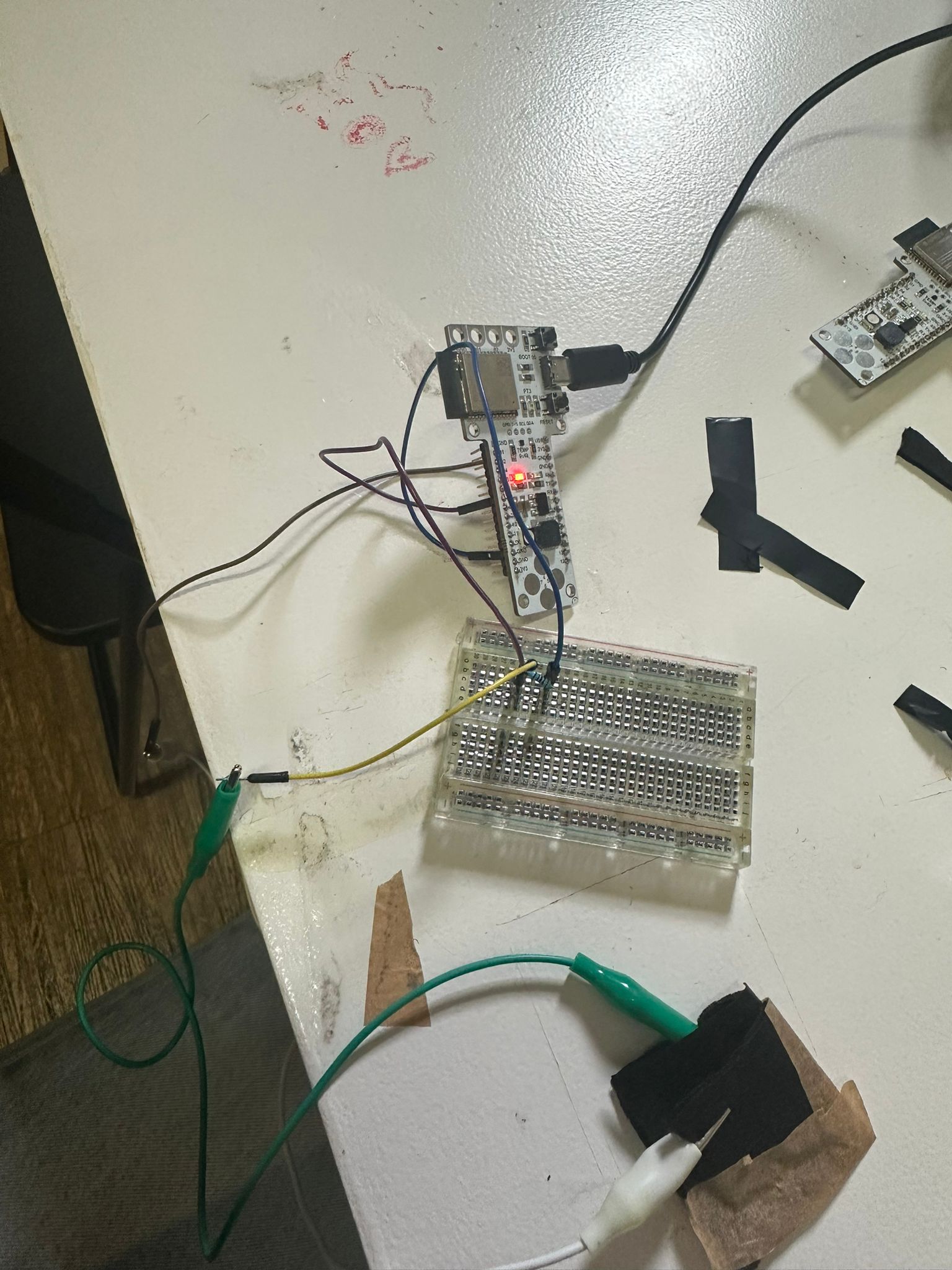
Testing the Circuit
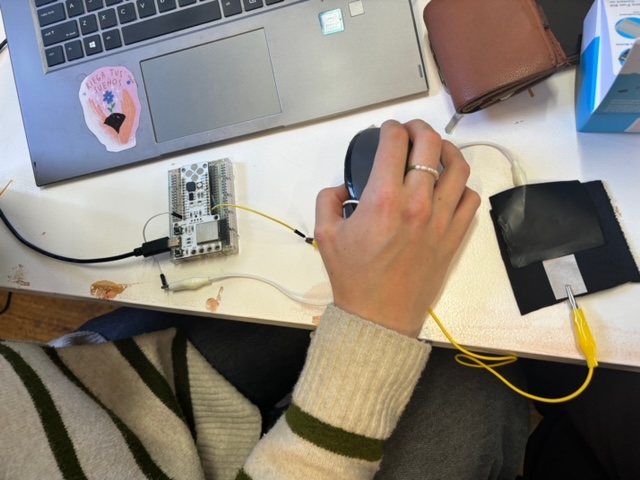
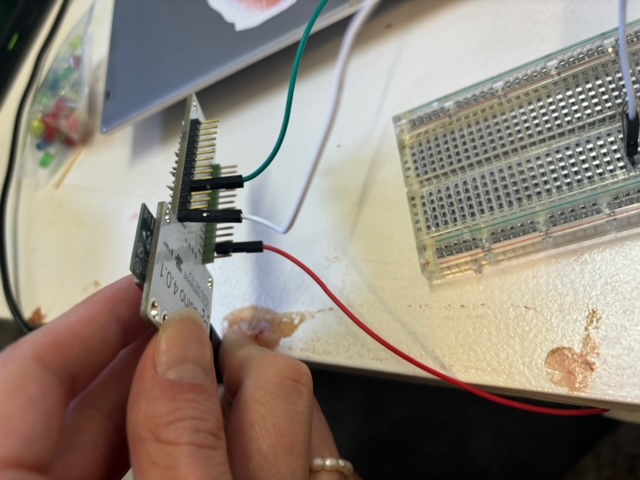
The first step we needed to take during this process was prototyping the circuit and testing how the conductive material functioned.
The first step we needed to take during this process was prototyping the circuit and testing how the conductive material functioned.
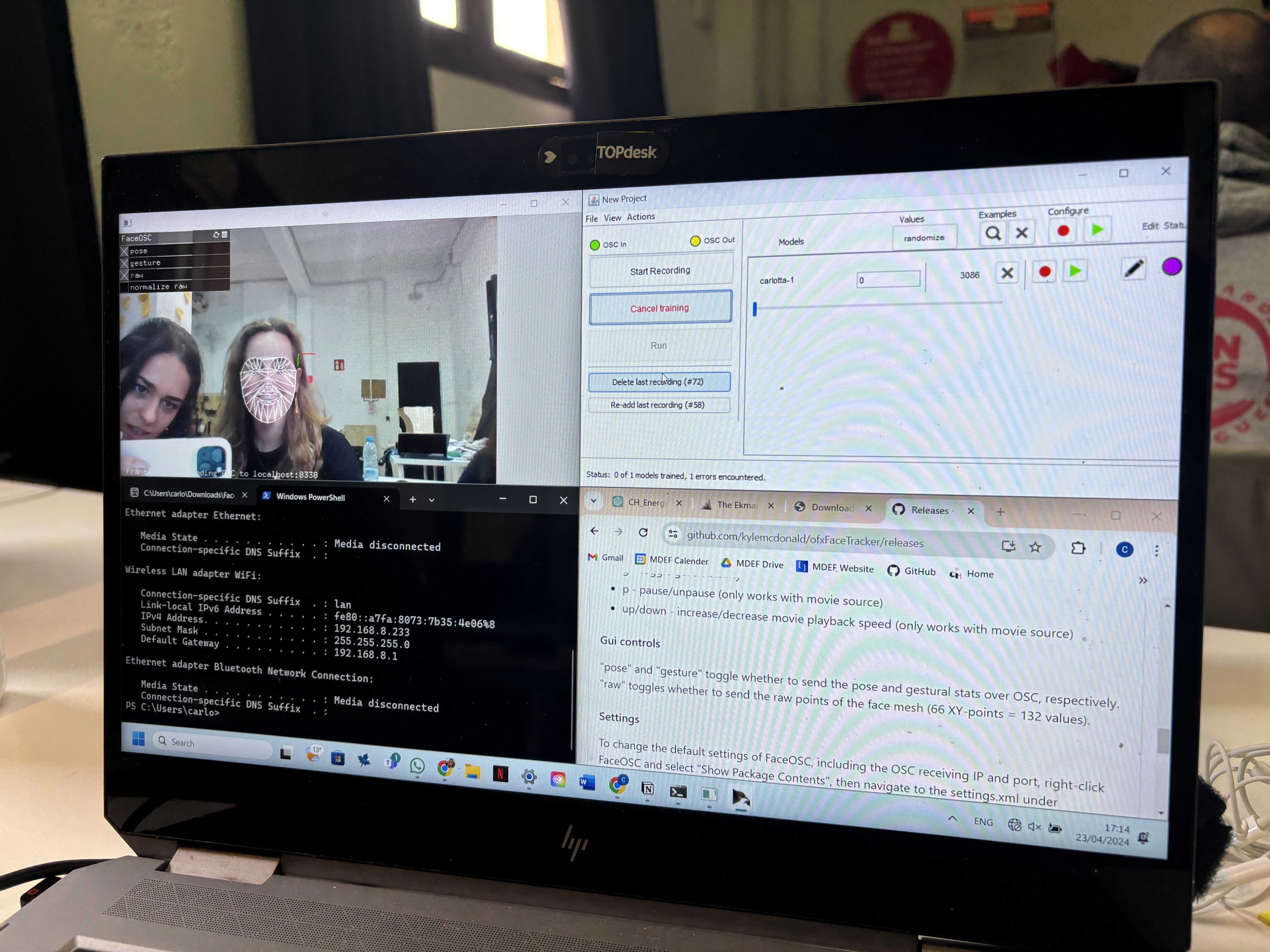
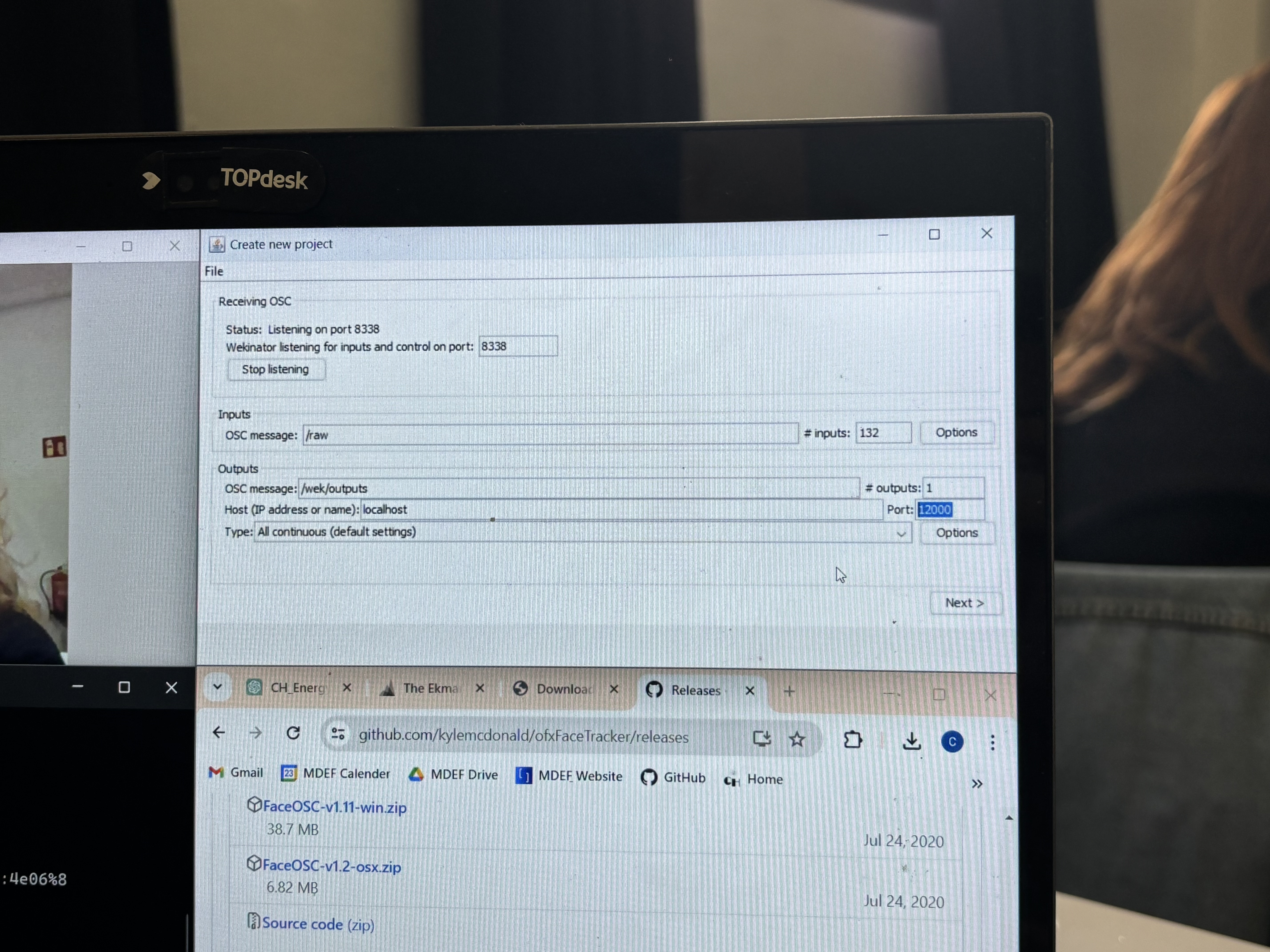


For the actual training of the Wekinator model, we worked with two movements. Straightened and then bent. I also played around with the idea of half bent but the training of the model did not have enough data to realize which movement that was so it was not a success. I think in the future if I would continue it would need many more samples to work. With the two inputs I was able to train I could then transfer this to a visual design of a ball increasing and decreasing in size.

No Code Website Builder